Which Algorithm? (March 11, 2016)
In the first article, we reviewed why a well might benefit from the use of plunger lift. The next article discussed when plunger lift applied to a well may result in higher production and/or lower lifting cost. This article focuses on another critical aspect of conventional plunger lift – which algorithm is best for my well? Algorithms for continuous run plungers will be addressed in a future article. An algorithm is simply the code in the controller which tells the control valve when to open and when to close. The algorithm may also record and display specific well information; such as pressures, flow rates, plunger cycle data, etc. Selecting the algorithm which generates the greatest production with the least amount of nonproductive time requires a basic understanding of plunger lift and gas well operations.
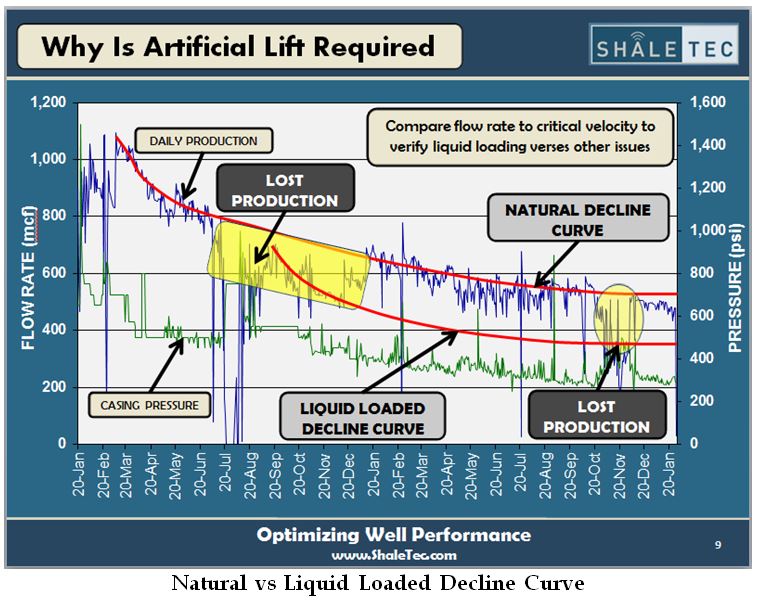
Plunger lift is an artificial lift means, with early patents dating back to the 1920’s. The primary purpose of plunger lift for gas wells is to remove liquid so that gas can flow freely to the surface. Plunger lift also effectively produces oil wells when sufficient gas is present. The ultimate objective of plunger lift is to maintain production on the well’s natural decline curve.
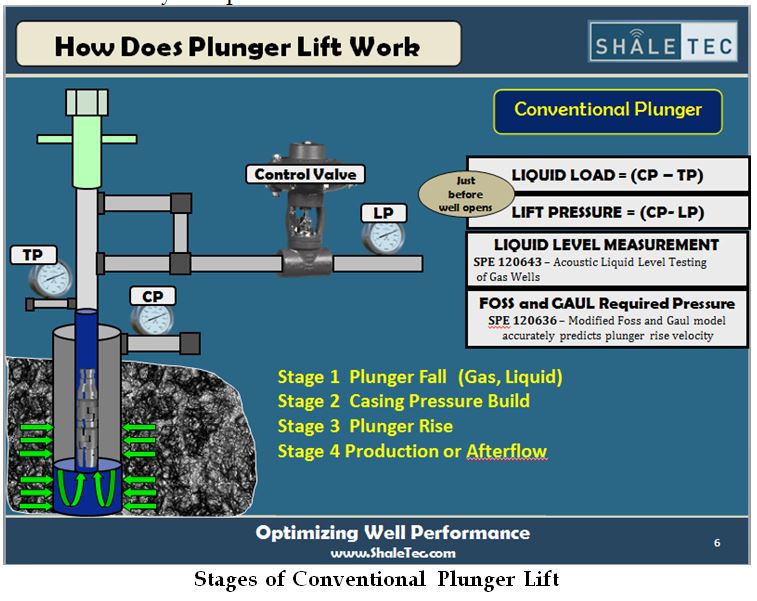
Conventional plunger lift systems progress through 4 stages. ALRDC’s “Guidelines and Recommended Practices: Use of Plunger Lift for Deliquifying Gas Wells” states “Simple On/Off controllers are not effective for optimization of a plunger lift system”. A simple on/off time based algorithm will cycle a plunger, yet rarely optimizes production.
To optimize production, each of the 4 stages for conventional plunger lift must be optimized. The first stage is the plunger fall stage. The well is closed for sufficient time allowing the plunger to reach the bottom-hole spring. If the well is closed too long, production is less. If the close time is too short, the plunger surfaces rapidly without lifting all the liquid in the tubing to the surface. Echometer’s well analyzer (www.Echometer.com) provides accurate plunger fall time data for the selected plunger. Factors affecting plunger fall time include the height of the gas and liquid column, plunger type, plunger wear, tubing pressure, tubing condition, etc. Accurately setting the correct plunger fall time can be challenging, unless proper tools and methods are utilized.
The second stage of plunger lift is the casing pressure build stage. When the plunger reaches the bottom of the well, casing pressure builds until it’s sufficient to push the plunger and column of liquid to the surface. Lift pressure (CP-LP) must be greater than the pressure created by the column of liquid in the tubing (CP-TP) for the plunger to surface. Stage 3 occurs when the well opens and the plunger begins its ascent to the surface. Stage 4, known as production mode or afterflow, begins when the plunger arrives at the surface. This stage continues until the desired volume of liquid, to be removed on the next cycle, enters the tubing. The well is then closed and the cycle repeats.
In order to select an effective algorithm, it’s necessary to consider how pressures and volume of liquid entering the tubing respond to time. When a well is closed for the same time interval on each cycle, it’s the rare occurrence when casing pressure consistently builds to the same value. On some cycles, casing pressure will be high, creating a faster plunger rise velocity. On some cycles, casing pressure will be low, resulting in a slower plunger rise velocity – or perhaps actually insufficient to surface the plunger. Ironically, casing pressure building to the same value over a set time interval may not be desired. When line pressure varies, casing pressure must adjust accordingly in order to lift the plunger at the same velocity. An algorithm which opens the well at the same lift pressure (CP-LP) often stabilizes plunger velocities (given a consistent volume of liquid in the tubing on each cycle).
In most wells, liquid primarily enters the tubing when the well is open (plunger rise stage plus afterflow). The longer the well flows below the critical flow rate, the more liquid falls to the bottom of the tubing. When a well is flowing above the down-hole critical flow rate, gas flow carries liquid to the surface.
Because plungers vary in their arrival times and afterflow approaches critical flow rate at varying time intervals, controlling afterflow based solely on time often contributes to significant variations in liquid loading. Variations in liquid loading and lift pressure cause inconsistent plunger velocities, often producing missed plunger arrivals, and thus contributing to nonproductive time. Striving for stability by adjusting open/close times can be a repetitive, time consuming and frustrating experience!
Plunger lift wells are sometimes produced as if the goal is to keep the plunger cycling, or even better, to ensure it cycles at a selected plunger rise velocity. Adding to the complexity, trip times are often erroneously substituted for plunger velocity. Reasoning suggests if the plunger is cycling, it must be working. Good arrivals and consistent plunger velocities are indicators of performance, yet neither a direct measure of revenue generated. Buyers pay for gas and usable liquids produced – not plunger cycles. Therefore, the only meaningful productivity measure for plunger lifted wells is optimal production without damaging equipment!
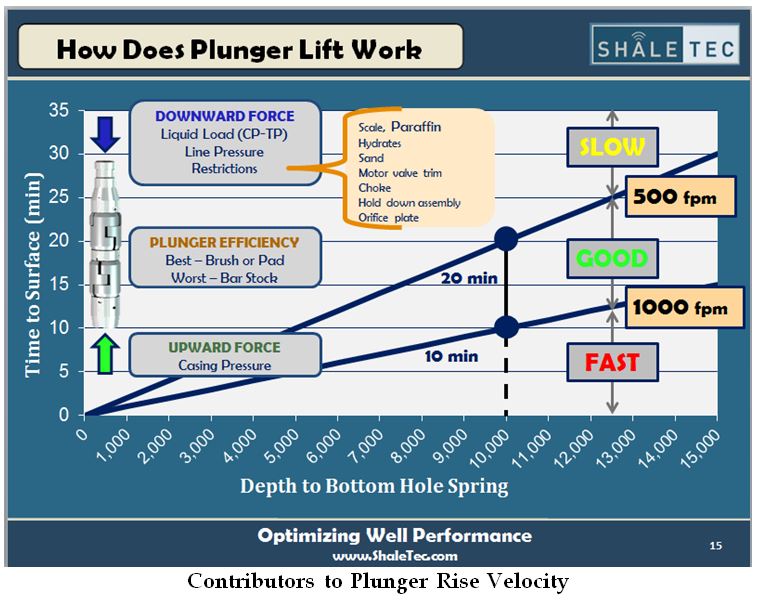
Setting a production goal based on the well’s natural decline curve (initial production to current) often provides a reasonable target. Avoiding damage created by fast plunger velocities requires knowledge of the wells equipment limitations. Bottom-hole and lubricator springs are designed to absorb a certain plunger velocity for a given plunger mass. The maximum allowed safe fall and rise velocity of the plunger must be known for the equipment utilized. The maximum allowed safe plunger rise velocity is much different than the industry guideline of 500 to 1000 fpm. This guideline addresses plunger efficiency, not equipment durability.
So, how can algorithms help achieve our production target, given the well’s naturally occurring variables? Manufacturers of controllers have given us plenty of options! Some controllers have close to 40 different algorithms from which to select. The majority of these can be grouped as shown in the plunger lift algorithm chart below.
Those algorithms which include naturally varying well parameters can help stabilize and optimize production. Casing pressure directly pushes the plunger and column of liquid to the surface. When casing pressure is low, producing bottom-hole pressure is low. Tubing pressure is a by-product of the liquid column in the well and casing pressure. Operating on a function of tubing pressure is often useful when operating wells with packers.
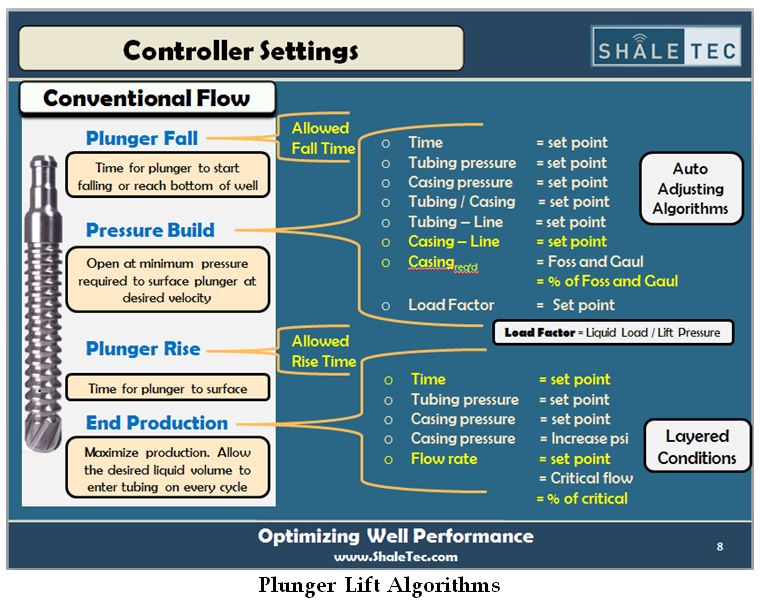
The Foss and Gaul equation is a theoretical calculation that predicts the casing pressure required to lift the plunger and volume of liquid in the tubing to the surface. The equation includes line pressure, volume of liquid in the tubing, depth of well, pressure to suspend the plunger and friction factors. From a practical viewpoint, using a multiplier times the Foss and Gaul required pressure often generates more consistent results, as other factors which vary from well to well also affect plunger rise velocity. The same is true when closing the well on critical flow rate. A multiplier times the critical flow rate often provides more consistent results.
Lift factor is lift pressure divided by liquid load. Lift factor is the same when lift pressure is 10 and liquid load is 5 as it is when lift pressure is 4 and liquid load is 2. Both equate to a lift factor of 2. However, the latter results in a lower producing bottom-hole pressure because the liquid load and casing pressure are low. The most gas and liquid flow into the well bore from the reservoir when the pressure in the well bore is low. Wells produce the most at the lowest flowing bottom-hole pressure.
Auto cycle algorithms self-adjust to maintain the plunger velocity within a user selected range. If the plunger rise velocity is outside the selected range, the algorithm automatically adjusts casing pressure build time or afterflow to re-center the plunger velocity within the prescribed range. Auto cycle algorithms are often used on wells with packers, as lift pressure and liquid load are unavailable to the operator. Selecting the most productive plunger velocity range requires some consideration. A pad or brush plunger may produce more at a significantly slower rise velocity (due to an effective seal) than a bar stock plunger. Consideration must also be given to whether or not maintaining the selected plunger velocity drives the well to operate at the lowest flowing bottom-hole pressure.
Our goal is to produce at the lowest flowing bottom-hole pressure, thus maintaining production on the well’s natural decline curve. Selecting an algorithm that adjusts with known well variations, while reducing backpressure, often results in the best performance. Ending the casing pressure build stage on lift pressure and afterflow by layering the conditions of casing pressure rise, critical flow rate and time often effectively achieves this objective. When liquid collects in the tubing, casing pressure increases – thus making casing pressure rise one means of ending afterflow. Layered conditions trigger the well to close when one of the conditions is achieved. In this manner, the liquid in the tubing is often consistent from cycle to cycle. While monitoring plunger velocity, lift pressure can be manually lowered by the operator until maximum production is achieved. Once the well is stable and operating at the lowest flowing bottom-hole pressure, ending the casing pressure build stage on lift factor may effectively maintain production.
There are a number of other factors to consider when selecting the best plunger lift algorithm, with operator knowledge being exceptionally high on the list!
If your team could benefit from a deeper understanding of plunger lift, please contact Shale Tec LLC to schedule a plunger lift training course.
See www.ShaleTec.com or send an e-mail to [email protected].
Shale Tec’s next open registration class is in Rock Springs, Wyoming on March 3 & 4; 2016. Registration is now open.
Please attend the Gas Well Deliquification Conference in Denver on February 29 through March 2. Shale Tec is presenting a paper on plunger lift algorithms and teaching part of the plunger lift training course on Feb 2. See www.alrdc.com.
And, consider joining the Linkedin Group “Plunger Lifted Gas Wells”
https://www.linkedin.com/groups/4636005/profile
The above article was written by David Cosby P.E. o Shale Tec LLC
Copyrighted February 2016